传感器
字数:3788 | 预计阅读时间:16分钟
感知的原理
感觉+知觉
感觉是接收到外界的变化,重点在接受
知觉是了解到外界的变化,重点在判断(不是回应)
⼈的感知系统中存在哪些
感受器官—感觉—感知对象?
机器的感知:模拟⼈类的感知能⼒获取外部环境的信息
接收+判断如何通过机器来实现?
接收信息:让传感器的某个属性发生对应的变化
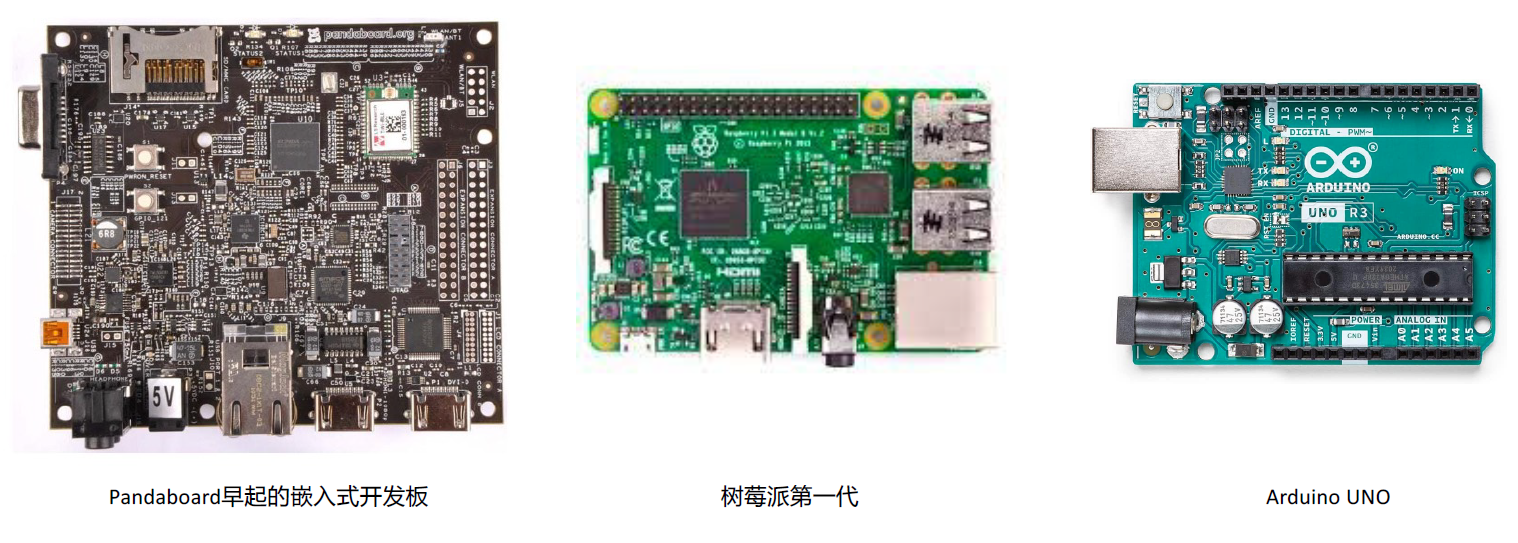
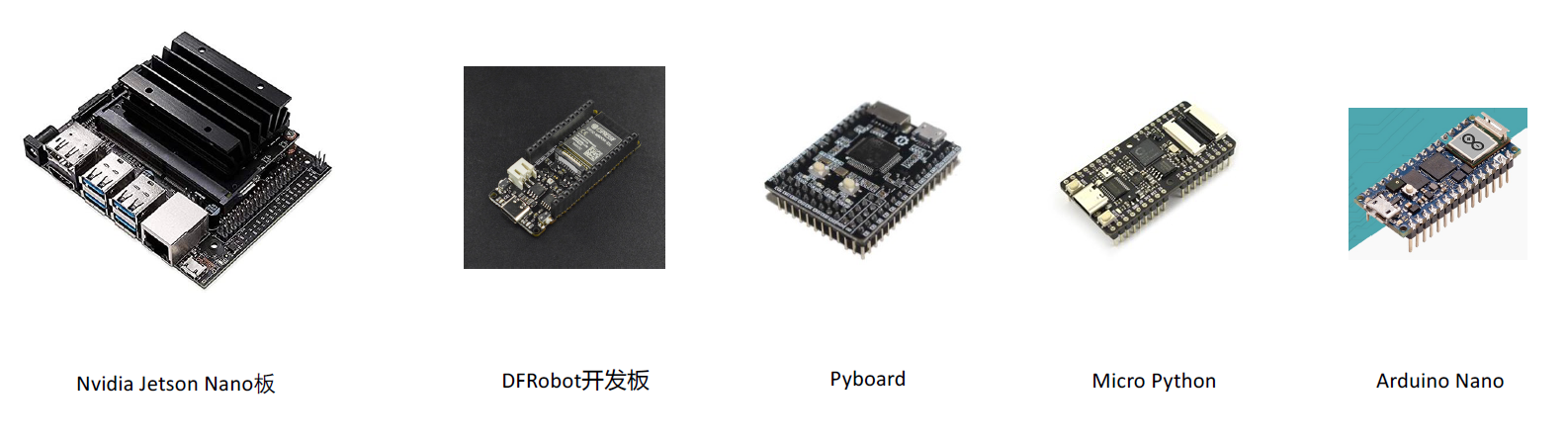
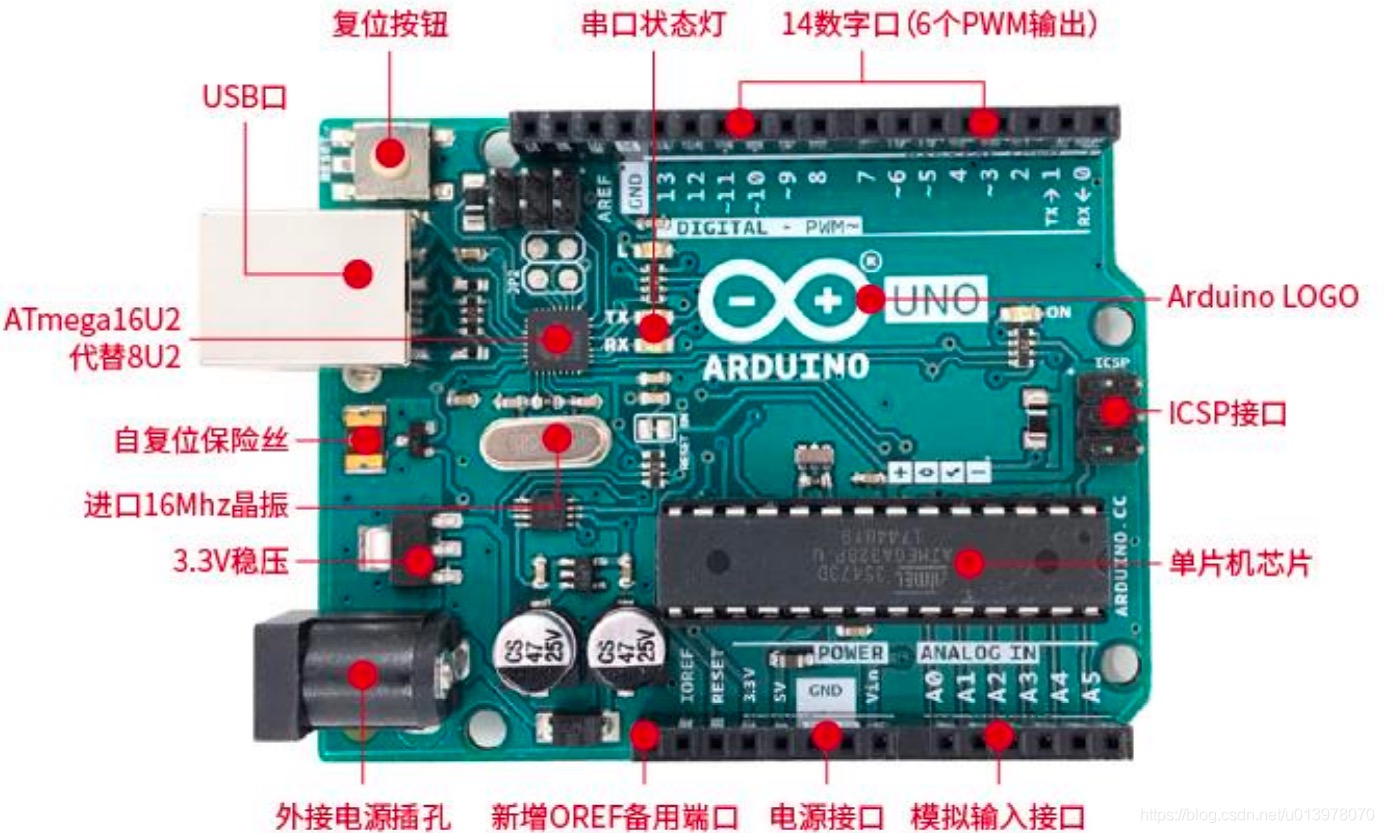
开发板辨认
传感器辨认

第一排:
双轴按键摇杆模块 (XY Joystick Module):带有黑色的摇杆帽,类似于游戏手柄上的摇杆。它可以输出 X 轴和 Y 轴的模拟量(电位器原理),并且按下摇杆时可以触发 Z 轴的数字按键信号。
RGB 三色 LED 模块 (RGB LED Module):黑色板子,带有一个透明的四脚 LED 灯珠(R, G, B, -)。通过控制三个颜色引脚的PWM信号,可以混合出各种颜色的光。
魔术光杯模块 (Magic Light Cup Module):包含一个透明 LED 和一个水银开关。这是魔术光杯的“另一半”,通常这两个模块配合使用,通过倾斜状态的改变来模拟光在两个杯子之间倒来倒去的效果。
第二排:
5V 继电器模块 (5V Relay Module):蓝色的方形元件(继电器)和蓝色的接线端子。它相当于一个电子开关,可以用单片机的低压/弱电流信号来控制高压/大电流设备的通断。
线性霍尔传感器模块 (Linear Hall Effect Sensor):红色板子,带有蓝色电位器,前端是一个黑色的三脚扁平元件。与普通的开关型霍尔不同,线性霍尔可以输出随磁场强度变化的模拟量信号。
SMD RGB 贴片 LED 模块 (SMD RGB LED Module):功能与三色 LED 模块类似,但这个使用的是表面贴装(SMD)的小型方形灯珠,通常亮度更高且光线更均匀。
第三排:
声音/麦克风传感器模块 (Sound / Microphone Sensor Module):红色板子,最前端有一个银色圆柱形带黑色网格的元件(驻极体麦克风)。它可以检测环境声音的大小,蓝色的电位器用于调节声音触发的灵敏度阈值。
槽型光耦 / 光折断器模块 (Photo Interrupter / Light Blocking Sensor):红色板子前端有一个黑色带凹槽的 U 型元件。两侧分别是红外发射管和接收管,当有物体经过凹槽遮挡住光线时,模块就会输出一个触发信号,常用于测速或限位检测。
双色 LED 模块 (Bi-color LED Module):黑色板子,带有一个三脚的磨砂/雾面 LED 灯珠。它内部封装了两种颜色的发光芯片(通常是红和绿),通过控制不同的引脚可以使其发红光、绿光或混合的颜色。
第一排:
魔术光杯模块 (Magic Light Cup Module):板子上同时带有一个玻璃水银开关和一个透明的 LED 灯。通常成对使用,倾斜时水银开关触发,控制 LED 的亮暗。
霍尔磁力传感器 (Hall Effect Sensor):顶端有一个黑色的三脚晶体管状元件(A3144霍尔元件),用于检测磁场的存在和强度。
红外避障传感器 (Infrared Obstacle Avoidance Sensor):红色PCB板,前端有一个黑色接收管和一个透明/浅蓝色红外发射管,板子上的蓝色方形元件是电位器,用来调节检测距离。
第二排:
双色或 RGB LED 模块 (Bi-color / RGB LED Module):一个大尺寸的透明 LED 灯珠直接焊接在带有三个引脚的电路板上,可以通过控制引脚输出不同颜色的光。
水银倾斜开关模块 (Mercury Tilt Switch Module):倾斜的玻璃管内可以清晰看到一滴银白色的水银。当模块倾斜导致水银滚动接触到两端引脚时,电路导通。
温度传感器模块 (DS18B20 / LM35 Temperature Sensor):带有一个TO-92 封装(半圆柱形)的黑色三脚芯片,通常是 DS18B20 数字温度传感器或 LM35 线性温度传感器。
第三排:
激光发射模块 (Laser Emitter Module):最显眼的是那个黄铜色的圆柱形激光头,通电后可以发射红色的激光束。
震动/倾斜开关模块 (Vibration / Tilt Switch Module):包含一个蓝色的方形塑料元件,内部有滚珠或弹簧结构,当发生震动或达到特定倾斜角度时会触发信号。
热敏电阻传感器 (Thermistor Module):伸出来的一颗非常微小的玻璃封装元件是热敏电阻(通常是 NTC),其电阻值会随环境温度的变化而改变,常用于测量环境温度。
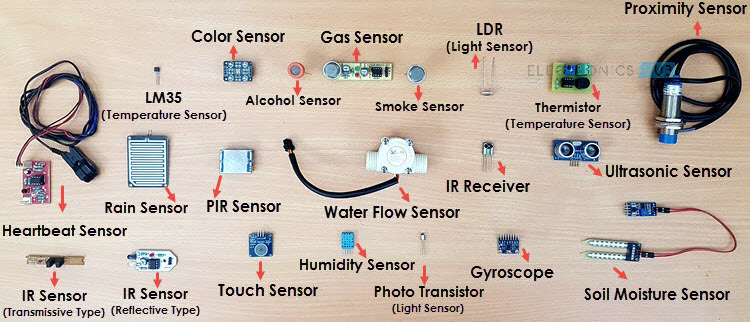
- Heartbeat Sensor (心率传感器):带有一个黑色的指夹(或耳夹)以及一块小型的信号处理板,用于检测脉搏。
-
IR Sensor (Transmissive Type) (透射式红外传感器 / 槽型光耦):其实就是“光折断器”,U型槽两侧分别是红外发射和接收端。
-
LM35 (Temperature Sensor) (LM35 温度传感器):长得像个三脚小晶体管(TO-92封装),用于输出与摄氏温度成线性关系的模拟电压。
- Color Sensor (颜色传感器):通常是 TCS3200 模块,板子上有几颗白色的 LED 用来补光,中间是感光阵列,用于识别物体的颜色。
- Alcohol Sensor (酒精传感器):MQ系列气体传感器的一种,探头内部有加热丝和气敏材料。
- Gas Sensor (气体传感器):同为MQ系列,根据型号不同(如MQ-2、MQ-3等)可以检测可燃气体、甲烷等。
- Smoke Sensor (烟雾传感器):也是MQ系列传感器,专门用于检测空气中的烟雾浓度。
- Rain Sensor (雨滴传感器):有一块表面布满梳状走线的检测板,当雨水滴在上面时,导电性会发生变化。
- PIR Sensor (人体红外传感器):被动式红外传感器,用来检测人或动物移动发出的红外线(图中这款似乎没带常见的白色半球形菲涅尔透镜)。
- Water Flow Sensor (水流量传感器):白色的塑料管件,内部有一个带有磁铁的水轮子和霍尔元件,水流过时转动产生脉冲信号。
- IR Sensor (Reflective Type) (反射式红外传感器):带有红外发射管和接收管,通常用于智能小车的黑白线循迹或近距离避障。
- Touch Sensor (触摸传感器):通常是电容式触摸模块,用手指触碰感应区就能输出开关信号。
- Humidity Sensor (湿度传感器):图中是一颗蓝色的 DHT11 温湿度传感器,可以同时测量环境的温度和湿度。
-
Photo Transistor (Light Sensor) (光敏三极管 / 光传感器):外观像个透明的小灯泡,对光线强度非常敏感。
-
LDR (Light Sensor) (光敏电阻):带有两根细长引脚,电阻值会随着环境光线的变亮而迅速降低。
- Thermistor (Temperature Sensor) (热敏电阻模块):最前端通常是一颗微小的玻璃珠(NTC热敏电阻),用于温度测量。
- Proximity Sensor (接近传感器 / 接近开关):最右上方带有一根长长的粗电缆,这种工业圆柱形外观的通常是电感式或电容式接近开关,常用于检测金属物体或自动化测距。
- IR Receiver (红外接收管):黑色的三脚元件,专门用来接收红外遥控器发出的 38KHz 载波信号。
- Ultrasonic Sensor (超声波传感器):大名鼎鼎的 HC-SR04,带有两个像眼睛一样的超声波发射头和接收头,用于测距。
- Gyroscope (陀螺仪模块):一块很小的方形电路板,通常是 MPU6050,可以测量三轴加速度和三轴角速度(姿态传感器)。
- Soil Moisture Sensor (土壤湿度传感器):带有两个长长的叉子形探针,插在花盆泥土里,通过测量土壤的导电率来判断泥土的干湿程度。
传感器具体使用
一、 环境感知传感器
1. NTC 热敏电阻
- 名称:NTC 热敏电阻
- 用法:与固定电阻组成分压电路,将温度变化转换为电压信号输出,经 Arduino 模拟引脚读取后,可利用 Steinhart-Hart 方程还原为温度值。
const int NTC_PIN = A0;
const float R_SERIES = 10000.0; // 10k固定电阻
const float R_NOMINAL = 10000.0; // 25 C NTC标称阻值
const float T_NOMINAL = 25.0; // 标称温度
const float B_COEFFICIENT = 3950.0;
void setup(){
Serial.begin(9600);
Serial.println("NTC热敏电阻温度计启动...");
}
void loop() {
int adcVal = analogRead(NTC_PIN);
// 后续代码可加入 Steinhart-Hart 方程换算温度
}
2. LM35 精密温度传感器
- 名称:LM35 精密温度传感器
- 用法:输出电压与摄氏温度严格线性对应,每升高1℃输出增加10mV,无需外部校准,直接连接模拟引脚即可使用。
const int LM35_PIN = A0;
void setup() {
Serial.begin(9600);
// analogReference(INTERNAL); // 提升精度时可取消注释
Serial.println("LM35 温度计启动...");
}
void loop() {
int adcVal = analogRead(LM35_PIN);
float voltage = adcVal * (5.0 / 1023.0); // 转换为电压
}
3. DHT11 / DHT22 温湿度传感器
- 名称:DHT11 温湿度模块
- 用法:内置 8 位 MCU,使用专有单总线协议输出经过校准的数字数据,可同时测量温度与湿度,需配合 Adafruit DHT 库使用。
#include <DHT.h>
#define DHT_PIN 2
#define DHT_TYPE DHT11 // 若使用DHT22则改为DHT22
DHT dht(DHT_PIN, DHT_TYPE);
void setup() {
Serial.begin(9600);
dht.begin();
Serial.println("DHT 温湿度传感器就绪");
}
void loop() {
delay(2000); // 采样间隔不能低于2秒
// 后续通过 dht.readTemperature() 和 dht.readHumidity() 读取
}
4. DS18B20 单总线数字温度传感器
- 名称:DS18B20 防水探头版
- 用法:支持 1-Wire 总线协议,多个传感器可共用同一根数据线,每个拥有唯一 64 位 ROM 地址,适合液体或潮湿环境。
#include <OneWire.h>
#include <DallasTemperature.h>
#define ONE_WIRE_BUS 2 // 数据引脚
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
void setup() {
Serial.begin(9600);
sensors.begin();
int count = sensors.getDeviceCount();
Serial.print("检测到");
Serial.print(count);
Serial.println(" DS18B20 传感器");
}
void loop() {
// 在此处加入传感器读取逻辑
}
5. 光敏电阻 (LDR)
- 名称:光敏电阻 (LDR)
- 用法:利用光电导效应工作,光照越强阻值越低,配合 10kΩ 分压电阻接入 Arduino 模拟引脚,常用于自动照明控制。
const int LDR_PIN = A0;
const int LED_PIN = 9;
void setup() {
Serial.begin(9600);
pinMode(LED_PIN, OUTPUT);
}
void loop() {
int lightVal = analogRead(LDR_PIN);
int brightness = map(lightVal, 50, 950, 255, 0); // 光越暗LED越亮
brightness = constrain(brightness, 0, 255); // 限制范围
// 可配合 analogWrite(LED_PIN, brightness); 使用
}
6. BH1750 数字光照强度传感器
- 名称:BH1750 光照模块
- 用法:16位数字环境光传感器,通过 I2C 接口直接以勒克斯 (lux) 为单位输出量化的光照强度,无需手动计算。
#include <Wire.h>
#include <BH1750.h>
BH1750 lightMeter;
void setup() {
Serial.begin(9600);
Wire.begin();
if (lightMeter.begin(BH1750::CONTINUOUS_HIGH_RES_MODE)) {
Serial.println("BH1750 初始化成功(高精度连续模式)");
} else {
Serial.println("BH1750 未找到,请检查接线!");
}
}
void loop() {
// 此处加入 lightMeter.readLightLevel() 等读取逻辑
}
7. BMP280 气压/温度传感器
- 名称:BMP280 气压模块
- 用法:高精度 MEMS 压阻式传感器,可同时测量气压和温度并推算海拔高度,使用 I2C 工作电压为 3.3V。
#include <Wire.h>
#include <Adafruit_BMP280.h>
Adafruit_BMP280 bmp;
void setup() {
Serial.begin(9600);
if (!bmp.begin(0x76)) { // SDO 接 GND 地址为 0x76
Serial.println("BMP280 未找到!检查地址和接线");
while (1) delay(10);
}
// 推荐天气监测配置
bmp.setSampling(Adafruit_BMP280::MODE_NORMAL,
Adafruit_BMP280::SAMPLING_X2);
}
void loop() {
// 获取数据的逻辑
}
二、 运动与距离传感器
8. HC-SR04 超声波测距传感器
- 名称:HC-SR04 超声波模块
- 用法:Trig 引脚发送高电平触发后,发射超声波脉冲,测量 Echo 引脚高电平脉冲的时间(飞行时间)以计算距离。
const int TRIG_PIN = 9;
const int ECHO_PIN = 10;
void setup() {
Serial.begin(9600);
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.println("HC-SR04 超声波测距仪就绪...");
}
float measureDistance() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
// 后续需发送 10us 高电平并用 pulseIn 读取回波时间
return 0.0;
}
void loop() {
measureDistance();
}
9. 红外避障传感器
- 名称:红外避障传感器
- 用法:通过发射和接收红外光,遇障碍物时反射信号触发比较器输出数字低电平(LOW),适用于机器人近距离避障或循迹。
const int IR_PIN = 7;
const int LED_PIN = 13;
void setup() {
Serial.begin(9600);
pinMode(IR_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
}
void loop() {
bool obstacle = (digitalRead(IR_PIN) == LOW);
if (obstacle) {
Serial.println("检测到障碍物!");
}
}
10. HC-SR501 PIR 人体红外传感器
- 名称:PIR 传感器 HC-SR501
- 用法:被动检测人体发出的远红外辐射变化,检测到运动时输出高电平(HIGH),模块上电需要大约 30 秒进行预热。
const int PIR_PIN = 8;
const int LED_PIN = 13;
const int BUZZER_PIN = 12;
bool prevState = false;
void setup() {
Serial.begin(9600);
pinMode(PIR_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
pinMode(BUZZER_PIN, OUTPUT);
Serial.println("PIR预热中,请稍候30秒...");
for (int i=30; i>0; i--) {
// 预热等待逻辑
}
}
void loop() {
// 通过 digitalRead(PIR_PIN) 读取状态并触发报警
}
11. MPU-6050 六轴 IMU 传感器
- 名称:MPU-6050 IMU 模块
- 用法:集成 3 轴陀螺仪和 3 轴加速度计,内置数字运动处理器(DMP)完成姿态解算,通过 I2C 接口通信。
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
if (mpu.testConnection()) {
Serial.println("MPU-6050 连接成功");
} else {
Serial.println("MPU-6050 未找到,检查接线!");
while (1);
}
}
void loop() {
// 在此读取加速度与陀螺仪数据
}
12. 旋转编码器
- 名称:旋转编码器
- 用法:通过输出 A/B 相位差 90° 的正交脉冲来检测旋转方向和角度,最佳实践是配合 Arduino 的外部中断进行精确计数。
const int CLK_PIN = 2; // 外部中断0
const int DT_PIN = 3;
const int SW_PIN = 4;
volatile int encoderCount = 0;
volatile int lastCLK;
void setup() {
// 初始化引脚及附加中断设置 (attachInterrupt)
}
// 中断服务函数
void encoderISR() {
int clkNow = digitalRead(CLK_PIN);
if (clkNow != lastCLK) {
if (clkNow == HIGH) {
if (digitalRead(DT_PIN) != clkNow) encoderCount++;
else encoderCount--;
}
}
lastCLK = clkNow;
}
void loop() {
// 主循环可读取并打印 encoderCount
}
三、 化学与特殊传感器
13. MQ-2 可燃气体/烟雾传感器
- 名称:MQ-2 气体传感器
- 用法:半导体接触气体时电阻显著下降,内部有加热丝维持工作温度。提供模拟电压浓度输出和数字阈值报警输出。
const int MQ2_AOUT = A0;
const int MQ2_DOUT = 7;
const int BUZZER_PIN = 12;
const int LED_RED = 13;
const int ALARM_THRESHOLD = 400; // ADC阈值
void setup() {
Serial.begin(9600);
pinMode(MQ2_DOUT, INPUT);
pinMode(BUZZER_PIN, OUTPUT);
pinMode(LED_RED, OUTPUT);
}
void loop() {
// 读取 MQ2_AOUT 或 MQ2_DOUT 实现报警逻辑
}
14. 土壤湿度传感器
- 名称:土壤湿度传感器
- 用法:测量土壤探针间的导电性(含水量越高电阻越低),建议通过数字引脚控制传感器供电,仅在读取时通电以减缓电化腐蚀。
const int SOIL_PIN = A0;
const int PUMP_PIN = 12; // 继电器控制水泵
const int PWR_PIN = 6; // 传感器供电引脚
const int DRY_THRESHOLD = 700;
const int WET_THRESHOLD = 350;
void setup() {
Serial.begin(9600);
pinMode(PUMP_PIN, OUTPUT);
pinMode(PWR_PIN, OUTPUT);
digitalWrite(PUMP_PIN, LOW);
Serial.println("智能浇花系统启动...");
}
void loop() {
// 控制 PWR_PIN 高电平进行读取,完成后拉低
}
15. 声音传感器模块
- 名称:声音传感器模块
- 用法:驻极体麦克风将声波振动转为电信号,AOUT 输出声波实时模拟电压,DOUT 在超阈值时切换数字电平。
const int SOUND_AOUT = A0;
const int SOUND_DOUT = 7;
const int LED_PIN = 9;
const int BASELINE = 512;
const int SAMPLE_NUM = 60;
void setup() {
// 初始化代码
}
float readSoundRMS() {
long sumSq = 0;
for (int i = 0; i < SAMPLE_NUM; i++) {
int v = analogRead(SOUND_AOUT) - BASELINE;
sumSq += (long)v * v;
delayMicroseconds(200);
}
// 返回计算后的均方根
return 0.0;
}
void loop() {
readSoundRMS();
}
16. A3144 霍尔传感器
- 名称:霍尔传感器 A3144
- 用法:单极性霍尔开关,检测到南极(S极)强磁场时输出低电平。由于是开漏输出,必须使用外部 10kΩ 上拉电阻。
const int HALL_PIN = 2; // 外部中断0
volatile unsigned long lastMicros = 0;
volatile unsigned long pulsePeriod = 0;
volatile bool newData = false;
void setup() {
// 需在此处使用 attachInterrupt 绑定 hallISR
}
// 中断服务函数
void hallISR() {
unsigned long now = micros();
if (lastMicros > 0) {
pulsePeriod = now - lastMicros;
newData = true;
}
lastMicros = now; // 记录本次触发时间
}
void loop() {
// 通过 pulsePeriod 计算 RPM 转速
}
信号采样滤波方法
限幅滤波法
设最大偏差 A
|新值 - 旧值| ≤ A → 接受
|新值 - 旧值| > A → 丢弃,用旧值
✓ 有效克服偶然脉冲干扰
✗ 无法抑制周期性干扰,平滑度差
中位值滤波法
连续采样 N 次(N取奇数)按大小排序 取第 (N+1)/2 位值
✓ 克服波动干扰;温度/液位效果良好
✗ 不适于流量、速度等快速变化参数
算术平均滤波法
ȳ = (x₁+x₂+…+xₙ) / N
流量 N=12,压力 N=4
✓ 适合具有随机干扰的平稳信号
✗ 测速慢;比较浪费 RAM
递推平均滤波法
固定长度队列(FIFO)
新数据入队尾,旧数据出队头
对队列内 N 个值取均值
流量 N=12,压力 N=4,液面 N=4~12,温度 N=1~4
✓ 对周期性干扰抑制强;平滑度高
✗ 灵敏度低;脉冲干扰抑制差;费RAM
一阶滞后滤波法
Y[n] = (1-a)·X[n] + a·Y[n-1]
a ∈ (0, 1) a越大平滑度越高,a越小灵敏度越高(响应快)
✓ 对周期性干扰抑制良好;适合高频波动
✗ 存在相位滞后;无法消除 > 采样频率½ 的干扰
加权递推平均滤波法
Y = Σ(wᵢ·xᵢ) / ΣWᵢ
越近时刻 → 权重越大;权大则灵敏↑,平滑↓
✓ 适合纯滞后大、采样周期短的系统
✗ 对变化缓慢信号效果差;参数调试复杂
消抖滤波法
新值=当前值 → 计数器清零
新值≠当前值 → 计数器+1
计数器≥N → 更新当前有效值
✓ 避免临界值附近控制器反复开/关抖动
✗ 不适于快速变化参数;可能引入干扰值
还有一些其他的滤波方法,是前面这些方法的组合
中位值平均滤波法 = 中位值滤波法 + 算术平均滤波法
限幅平均滤波法 = 限幅滤波法 + 递推平均滤波法
限幅消抖滤波法 = 限幅滤波法 + 消抖滤波法
其他知识
PWM
PWM,即脉冲宽度调制(Pulse Width Modulation),是一种利用数字信号来控制模拟电路的有效技术。其基本原理是通过改变一系列固定频率脉冲的宽度,从而调节这些脉冲的占空比(高电平时间与整个周期时间的比例),以此来模拟连续的模拟信号。
PWM有哪些优势
效率高:由于大部分时间要么完全导通要么完全截止,减少了功率损耗。
成本低廉:只需简单的电路即可实现复杂的控制功能。
灵活性高:通过软件即可改变脉冲宽度,易于实现动态控制。
稳定性好:对于负载变化,通过调整PWM信号即可维持输出稳定
PWM有哪些应用场景
电机控制,灯光控制,电力电子设备,温度控制,音频信号处理,电池充电,传感器信号调理,风扇速度控制