I2C-SPI-USB通信
字数:1970 | 预计阅读时间:7分钟
在b站上发现了一个讲的很好的up主:蓝指针科普
I2C
半双工通信
为了解决早期电视机内部芯片间通信布线复杂,并行总线占用引脚多、PCB面积大的问题,飞利浦半导体提出两线式串行总线。
仅使用 SDA 数据线与 SCL 时钟线,多设备共享同一总线,通过地址区分
| 发展阶段 | 1980 | 1992 | 1998 | 2007 | 2010s | 2010s |
|---|---|---|---|---|---|---|
| 速率 | 100 kbps | 400 kbps | 3.4 Mbps | 1~5 Mbps | / | 12.5 Mbps+ |
| 发展 | 内部芯片 | / | Hs-mode | Fast-mode | 传感器、RTC、显示屏 | 高性能传感器 |
主设备:MCU,从设备:显示屏、温度传感器或者风扇
时钟线传输周期性的高电平,从设备会在高电平的时候读取数据线的内容。
START:高到低,起始信号;STOP:低到高,终止信号
写入数据:
| S | 设备地址 | W | A | 寄存器地址 | A | 写入数据 | A | P |
|---|---|---|---|---|---|---|---|---|
| 7 bits | 0 |
读取数据:
| S | 设备地址 | W | A | 寄存器地址 | A | S | 设备地址 | R | A | 读取的数据 | A | P |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 7 bits | 0 | 1 | NACK |
注意从导数第二个ACK之后,从设备给主设备发数据,主设备给从设备发NACK,并发送终止信号
常见设备地址
| 设备类型 | 常见芯片 | 7位地址 (Hex) | 地址位控制 (引脚) | 功能 |
|---|---|---|---|---|
| IMU (六轴传感器) | MPU6050 / MPU6500 | 0x68 | AD0 引脚接高电平变为 0x69 | 测量加速度、角速度(陀螺仪) |
| OLED 显示屏 | SSD1306 / SH1106 | 0x3C | 改变背面电阻位置可变为 0x3D | 0.96/1.3寸小屏幕显示 |
| EEPROM (存储) | AT24C02 / AT24C32 | 0x50 | A0/A1/A2 组合可变 0x50~0x57 | 掉电不丢失的数据存储 |
| RTC (实时时钟) | DS3231 / DS1307 | 0x68 | 固定地址 | 获取精确的时间、日期 |
| 温湿度传感器 | AHT10 / AHT20 | 0x38 | 固定地址 | 测量环境温度和湿度 |
| 气压计/高度计 | BMP280 / BME280 | 0x76 | SDO 引脚接高电平变为 0x77 | 测量大气压和海拔高度 |
Arduino开发
SDA:A4 SCL:A5
Arduino Wire 库 API 速查表
| 函数 | 功能简述 |
|---|---|
| Wire.begin() | 以主机 (Master) 模式初始化 I2C 总线 |
| Wire.begin(address) | 以从机 (Slave) 模式加入总线,address 为 7 位从机地址 |
| Wire.setClock(hz) | 修改 I2C 通信时钟频率(如 100000 或 400000) |
| Wire.beginTransmission(address) | 启动对指定地址从机的写操作(开启缓冲区) |
| Wire.write(value/string) | 向缓冲区写入单个字节/字符串数据 |
| Wire.write(data, length) | 向缓冲区写入指定长度的字节数组 |
| Wire.endTransmission() | 真正发送缓冲区内容并结束传输,返回状态码 |
| Wire.requestFrom(address, quantity) | 主机向从机请求读取指定数量的字节 |
| Wire.available() | 返回当前接收缓冲区中可用的字节数 |
| Wire.read() | 从缓冲区读取一个字节的数据 |
| Wire.onReceive(handler) | 仅从机: 注册当从机收到主机数据时的回调函数 |
| Wire.onRequest(handler) | 仅从机: 注册当主机请求数据时的回调函数 |
给设备0x68写数据
Wire.beginTransmission(0x68);
Wire.write(0x3B); // 寄存器地址
Wire.write(0x01); // 要修改的值
Wire.endTransmission();
读取温湿度传感器SHT20
#include <Wire.h>
#define SHT20_ADDR 0x40
void setup() {
Wire.begin();
Serial.begin(9600);
}
float readTemperature() {
// 输入设备地址
Wire.beginTransmission(SHT20_ADDR);
Wire.write(0xF3);
Wire.endTransmission();
delay(100);
Wire.requestFrom(SHT20_ADDR, 3);
if (Wire.available() >= 3) {
uint16_t raw = (Wire.read() << 8) | Wire.read();
// 最后两位是状态位,为了不影响数据选择清零
raw &= 0xFFFC;
return -46.85 + 175.72 * raw / 65536.0;
}
return -999;
}
void loop() {
float temp = readTemperature();
Serial.print("Temp: ");
Serial.println(temp, 2);
delay(2000);
}
SPI
全双工
| 信号线 | 全称 | 作用 | 方向 | 电平逻辑 (通常) |
|---|---|---|---|---|
| SCLK | Serial Clock | 串行时钟,提供数据传输的同步脉冲。时钟频率决定了通信速率。 | 主 \(\rightarrow\) 从 | 由主设备产生脉冲 |
| MOSI | Master Out Slave In | 主出从入:主设备通过此线将控制指令或数据发送给从设备。 | 主 \(\rightarrow\) 从 | 高/低电平 |
| MISO | Master In Slave Out | 主入从出:从设备通过此线将状态或数据反馈给主设备。 | 从 \(\rightarrow\) 主 | 高/低电平 |
| CS / SS | Chip Select / Slave Select | 片选/从机选择:用于激活特定的从设备。多个从设备共用总线时,通过此线区分。 | 主 \(\rightarrow\) 从 | 低电平有效 (Active Low) |
两者数据通过移位寄存器进行传输,简单说就是敌进我退,敌退我进。
SPI 时序:
| 模式 (Mode) | CPOL | CPHA | 空闲电平 | 采样时刻 |
|---|---|---|---|---|
| Mode 0 | 0 | 0 | 低电平 | 第 1 个边沿 (上升沿) |
| Mode 1 | 0 | 1 | 低电平 | 第 2 个边沿 (下降沿) |
| Mode 2 | 1 | 0 | 高电平 | 第 1 个边沿 (下降沿) |
| Mode 3 | 1 | 1 | 高电平 | 第 2 个边沿 (上升沿) |
SPI 主从:
| 组件名称 | 片选信号线 | 逻辑状态 | 选通效果 | MISO 状态 |
|---|---|---|---|---|
| Flash 存储器 | CS0 | 0 (Low) | 选中:接收指令并存储/读出数据 | 处于驱动状态(输出数据) |
| ADC 采样芯片 | CS1 | 0 (Low) | 选中:开始转换并传输模拟数值 | 处于驱动状态(输出数据) |
| Display 显示屏 | CS2 | 0 (Low) | 选中:接收显存数据进行刷新 | 处于驱动状态(输出数据) |
| 全总线 | 所有 CS | 1 (High) | 空闲:没有任何设备在通信 | 高阻态 (Hi-Z):防止干扰 |
Arduino开发
| 开发板型号 | SCLK | MOSI | MISO | SS (默认) | 备注 |
|---|---|---|---|---|---|
| Arduino UNO / Nano | D13 | D11 | D12 | D10 | 经典的 ATmega328P 布局 |
| Arduino Mega 2560 | D52 | D51 | D50 | D53 | 适用于多设备的大型项目 |
| Arduino Leonardo | ICSP-3 | ICSP-4 | ICSP-1 | 无默认 | 引脚未引出至数字 IO,需查阅 ICSP 接口 |
| ESP32 (Default) | GPIO 18 | GPIO 23 | GPIO 19 | GPIO 5 | 通常指 VSPI 接口,引脚可灵活映射 |
SPI 标准库常用函数简表
| 函数名称 | 功能说明 |
|---|---|
| SPI.begin() | 初始化 SPI 总线(设置引脚模式并拉高 SS)。 |
| SPI.beginTransaction() | 根据指定的频率、位序和模式配置 SPI 总线。 |
| SPI.transfer() | 核心传输函数:发送 1 字节数据的同时接收 1 字节。 |
| SPI.transfer16() | 连续发送并接收 2 字节(16 位)数据。 |
| SPI.endTransaction() | 结束当前的 SPI 事务,释放总线配置。 |
| SPI.end() | 关闭 SPI 外设,停止总线时钟。 |
读取SPI设备寄存器
#include <SPI.h>
const int CS_PIN = 10;
void setup() {
Serial.begin(9600);
SPI.begin();
pinMode(CS_PIN, OUTPUT);
digitalWrite(CS_PIN, HIGH);
}
uint8_t readRegister(uint8_t reg) {
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE0));
digitalWrite(CS_PIN, LOW);
// 将最高位置 1 表示“读取”
SPI.transfer(reg | 0x80);
// 发送空字节(0x00)以产生时钟脉冲,从而交换回从设备内部的数据
uint8_t value = SPI.transfer(0x00);
digitalWrite(CS_PIN, HIGH);
SPI.endTransaction();
return value;
}
void loop() {
uint8_t id = readRegister(0x00);
Serial.print("Device ID: 0x");
Serial.println(id, HEX);
delay(1000);
}
SPI vs I²C vs UART
| 对比维度 | SPI | I²C | UART |
|---|---|---|---|
| 通信方式 | 同步、全双工 | 同步、半双工 | 异步、全双工 |
| 信号线数量 | 4 根核心线(每增从机需加 CS) | 2 根 (SDA, SCL) | 2 根 (TX, RX) |
| 通信速度 | 极快 (通常可达 10Mbps-100Mbps) | 中低速 (100k, 400k, 3.4Mbps) | 低速 (常用 115200bps) |
| 多设备支持 | 靠物理片选线 (CS) 区分 | 靠软件设备地址区分 | 通常仅支持点对点 |
| 传输距离 | 短(板级通信,通常 < 20cm) | 中短(板级,需上拉电阻) | 长(配合 RS232/485 可达千米) |
| 协议复杂度 | 极低(直接移位传输) | 中(需要应答、起始/停止位) | 低(需约定波特率、校验位) |
| 典型应用场景 | 高速 Flash、高清屏幕、精密 ADC | 小型传感器、RTC、EEPROM | 串口调试、GNSS、无线透传模块 |
USB
Universal Serial Bus通用串行总线
传统的USB接口有4条线:VCC、GND、D+、D-
D+、D- 是差分信号输入线
用差分的方法进行传输,发送端两条信号线上发送幅值一样但是相位相反的信号,在接收端将这两个信号进行减法运算,就会得到相位相同幅值翻倍的信号
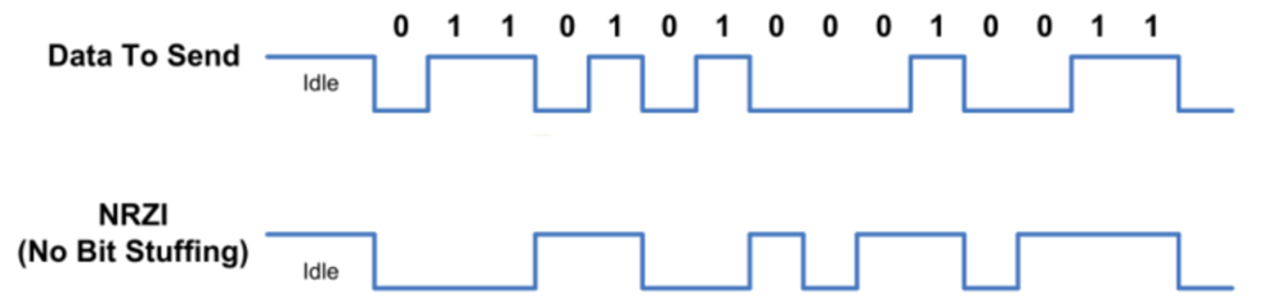
NRZI
USB的编码方式为NRZI(Non Return to Zero Invert,不归零就反向),NRZI编码是一种映射一个二进制信号的方法,编码后电平只有正负电平之分,没有零电平,所以也是不归零编码。当数据为0时,电平翻转,数据为1时,电平不翻转
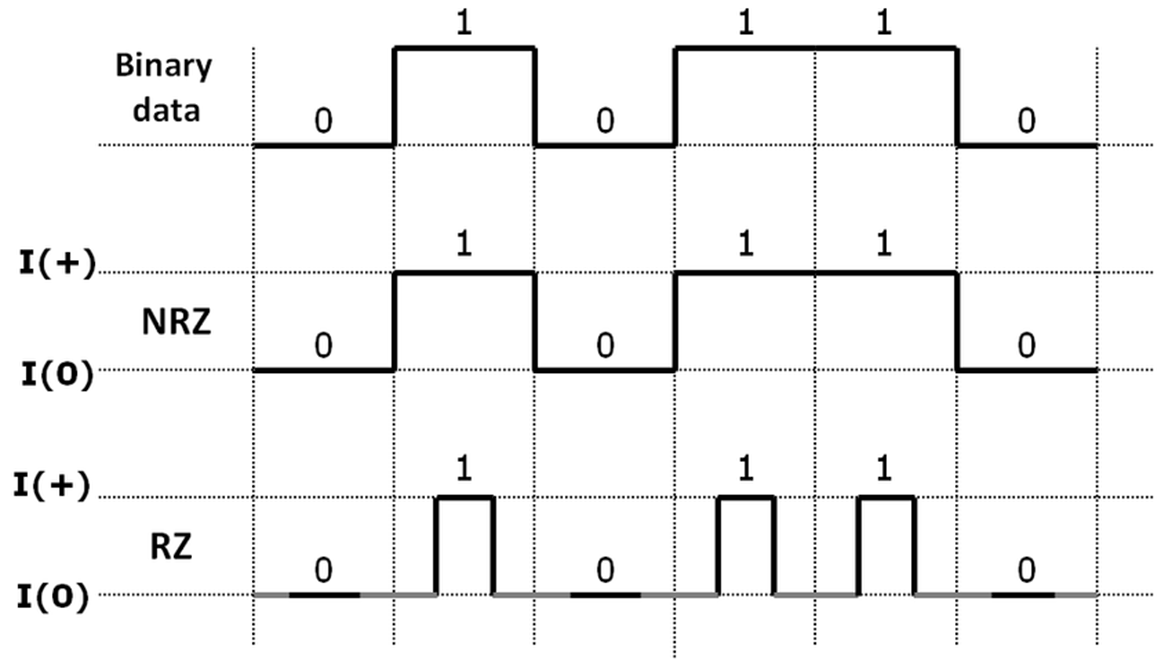
NRZ非归零编码和RZ归零编码方式示意图
USB的接口类型

USB数据传输和数据包
如何得到通信频率:先发送一个同步头,内容是 0101010 的方波,让接受端通过这个同步头计算出发送者的频率,然后再用这个频率通信
| 组成 | 同步域 (SYNC) | 包标识符 (PID) | Payload | CRC | EOP |
|---|---|---|---|---|---|
| 功能 | 由 0000 0001 经过 NRZI 编码产生的方波。用于让接收端同步时钟频率. |
由 4 位类型码和 4 位校验码(原码的反码)组成。 | 目标设备地址、端点号(对于令牌包)或实际传输的内容(对于数据包) | 令牌包通常使用 5 位,数据使用 16 位 | 将 \(D+\) 和 \(D-\) 线同时拉低 |